

1. 서론
2. 선행연구
3. 연구방법
1) 연구 지역
2) 활용 데이터의 개요
3) 연구 방법론
4. 연구 결과
1) 교차로 교통환경 복잡성
2) 도시개발 정도와 복잡성 변수 및 교통사고의 상관관계
3) 도시개발 정도에 따른 복잡성 변수와 교통사고와의 상관관계
5. 요약 및 결론
1. 서론
미국 조지아주 교통부에 의하면 조지아주(State of Georgia)에서 2023년 한 해 동안 374,008건의 교통사고가 발생하였다(Georgia Department of Transportation, 2024). 그 원인으로 운전자 또는 보행자의 부주의나 실수에 의해 발생하는 인적요인이 90% 이상을 차지하였다(Bucsuházy et al., 2020). 운전은 이동하는 동적 조건에서 도로상의 물체를 시각적으로 인지하고 차량 상태를 모니터링하며 의사결정을 내리는 복잡한 작업이다. 이런 배경에서 운전 안전성을 운전자의 상황 인식과 연관시키는 연구는 매우 다양하게 이뤄지고 있다(Ma and Kaber, 2005). 특히 시각적 혼잡과 도로의 복잡성이 증가하는 환경적 요인에 의해 운전자의 상황 인식은 악화될 수 있으며 이는 운전 성능 저하와 운전자의 실수로 이어질 수 있다(Chaparro and Alton, 2000).
일상적인 의사결정과 행동은 그들이 인지하는 환경의 ‘장면 복잡성’에 영향을 받는다고 알려져 있다(Montello, 2018). 이때 복잡한 공간환경에서 인간은 장면을 이해하고 공간을 인식하거나 재구성하는데 어려움을 겪는 경우가 많다(Guan et al., 2022). 따라서 도로교통 운전자는 도로 혹은 주변환경이 복잡할수록 목적지를 찾거나 경로를 확인하는데 더 많은 시간을 필요로 하거나 더 빈번히 실수를 하게 된다. 예컨대, 차량네비게이션의 안내를 제대로 이행하지 못하거나 어떤 경우는 도로 안전 사고를 야기하기도 한다. 도로 위의 다양한 운전 환경 중에서 특히 교통 흐름이 합쳐지고 나누어지는 교차로는 차량의 이동 패턴이 다양하게 나타나는 동시에 횡단보도를 통한 보행자의 이동 역시 발생한다. 운전자는 교차로 환경을 인지한 상태로 우회전, 좌회전, 직진 등 결정을 내려야 하기 때문에 교차로는 다른 도로교통 환경보다 매우 복잡한 특성을 가진다. 또한, 치명적인 충돌과 부상 사고의 50% 이상이 교차로 또는 교차로 근처에서 발생(FHWA, 2023)하고 있다는 사실에 주목할 필요가 있다. 이에 따라 교통사고 발생의 인적요인인 운전자 관점에서 인지되는 교통환경의 복잡성을 복합적으로 이해할 필요가 있으며 다른 운전 환경보다 복잡성이 높은 교차로의 교통환경을 대상으로 다양한 변수를 활용하여 정량화하고 그 특성을 확인하는 것이 필요하다.
교통사고와 같은 도로 안전 문제는 공간적으로 균일하게 발생하지 않으며 특히나 도시와 농촌 간의 격차는 전 세계적으로 인식되고 있다(Loo et al., 2011). 그러나 운전자 중심의 교차로 교통환경 복잡성에 관한 연구는 아직 부족한 실정이다. 특히, 교차로 주변의 토지이용이 주변지역의 도시화 정도에 많은 영향을 받는다는 점을 고려할 때, 도시개발 정도를 고려하여 교통환경 복잡성과 교통사고와의 상관성을 파악하는 연구는 찾아보기 어렵다. 나아가, 대중교통이 발달하지 못한 미국의 대도시 지역에 대한 교통환경 복잡성 연구는 찾아보기 어렵다. 이러한 맥락에서 본 연구의 목적은 다음과 같다. 첫째, 도로 위에서 이동하는 객체인 운전자의 관점에서 교차로 교통환경을 인지하고 이해하는데 영향을 미치는 복잡성을 정량화하여 파악하고자 한다. 둘째, 도시개발 정도를 고려하여 교차로 교통환경 복잡성이 교통사고에 미치는 영향과 관계성을 파악하고자 한다.
2. 선행연구
선행 연구를 크게 도시개발 정도와 교통사고에 관한 연구, 환경 인지 복잡성에 관한 연구로 나누어 살펴보면 다음과 같다. 도시개발 정도와 교통사고에 관한 연구는 주로 도시와 농촌의 특성을 비교하거나 토지이용과 교통사고와의 관련성에 집중되었다. 미국의 국가고속도로교통안전청(NHTSA, 2009)은 1998년부터 2007년까지 농촌 지역에서의 도로 사망률이 도시 지역보다 높았다고 밝혔다. Kmet and Macarthur(2006)는 캐나다 알버타 주의 어린이와 청소년들의 사고 사망률과 입원율이 농촌 지역에서 높게 나타나는 사실을 확인하였다. Pulugurtha et al.(2013)은 상업 지역, 주거지역, 혼합 지역 등 토지이용 특성에 따른 교통사고 발생 추정 모델을 개발하여, 혼합 용도 개발, 단독 주택, 상업 지구 등이 교통사고 발생과 강한 상관관계를 보이는 것을 밝혔다. 특히, Chen and Lym(2021)은 도시화된 도로 환경에서 산만한 운전으로 인한 사고의 빈도가 그렇지 않은 운전 사고의 빈도에 비해 월등하게 높게 나타나는 사실을 확인했다.
환경 인지 복잡성 모델링 연구는 시각적 복잡성과 구조적 복잡성, 그리고 최근 주요관심지점(Point of Interest, POI) 복잡성으로 크게 구분된다(Guan et al., 2022). 우선, 복잡한 시각 환경은 운전자의 능력과 운전 행태에 상당한 영향을 미치고(서원호, 2014), 하늘 개방성과 건물 밀도, 식생 밀도는 환경 인식과 이해에 미치는 영향이 크다(Yao et al., 2021). 도로에 인접한 식생과 같은 자연 환경은 스트레스 감소 등 운전 활동에 많은 긍정적인 영향을 미치는 것으로 밝혀졌다(Cackowski and Nasar, 2003). 둘째, 교통환경의 구조적 복잡성에 관한 연구는 도로 구간과 교차로의 구조적 특성을 정량화하는데 중점을 둔 연구가 주목을 받고 있다(Guan et al., 2023). Haque et al.(2007)은 교차로에서 좌회전을 실행해야할 때, 교차도로가 하나만 있을 때보다 여러 개의 교차도로가 있을 때 구조적 복잡성이 증대됨을 확인했으며, Kononov et al.(2008)은 차선 수가 증가하면 차선 변경과 관련된 충돌 가능성이 증가하기 때문에 사고 수가 증가한다는 것을 확인했다. 교통환경 내 도로의 물리적 특성인 차량의 속도는 대부분의 연구에서 교통사고와 밀접한 관련이 있었으며(Aarts and Van Schagen, 2006), 교통량의 증가는 차량 속도와 차선 변경에 대한 운전자의 의사결정에 복잡성을 증가시키는 요인으로 지목되었다(de Waard et al., 2008). 마지막으로, POI는 최근 내비게이션을 활용하는 최근 운전환경에서 공간 인지에 중요한 역할을 한다(Duckham et al., 2010). Dritsa and Biloria(2021)는 POI 밀도가 높을수록 시각적으로 인식하는 정보의 양과 다양성, 즉 ‘시각적 자극의 복잡성’이 증가하는 경향이 있음을 밝혔다. 다른 한편으로, 잘 알려진 POI는 랜드마크로써 기능하여 주변 공간을 인지하는데 도움을 준다(Guan et al., 2023). Chen et al.(2020)는 POI 데이터를 XGBoost 모델에 적용하여 사고가 발생한 지역 주변의 특성을 파악했으며 그 결과 상업 지구나 학교 근처의 교차로에서 교통사고 발생 가능성이 더 높음을 확인했다.
선행연구들을 종합해 보면 교차로의 복잡성이 교통사고와 연관이 있다는 점은 명백하다. 하지만, 동일한 변수라도 도시개발 정도에 따라 다르게 작용할 수 있다는 점에 대해서는 아직 연구가 미미하다. 상업시설이 고도로 발달하지 않은 농촌 지역에서 맥도날드 가게나 주유소 등은 중요한 POI로써 운전자의 상황 인식에 크게 도움을 준다. 반면에, 도시지역에서는 다른 POI도 다수 존재하기 때문에 POI로써 그들의 의미가 상대적으로 줄어들 수 있다. 또한, 농촌 지역에서 차선의 수나 이미지 엔트로피 등과 같은 복잡성 변수 역시 도시 지역에 비해 큰 차이가 나타나기 때문에 교통사고에 기여하는 교차로 환경 변수 또한 다르게 나타날 수 있다. 이런 맥락에서 주변지역의 도시개발 정도를 고려하지 않은 교차로 환경변수 연구는 연구 지역의 도시개발 정도가 비슷하지 않은 경우 부정확한 결과를 도출할 가능성이 있다. 따라서 본 연구에서는 도시개발 정도에 따라 교통사고에 관련된 교차로 환경변수들에 차이가 있을 것이라는 점을 연구가설로 설정하여 어떤 변수가 특정 도시개발 정도의 지역에서 교통사고와 관련되는가를 분석하였다.
3. 연구방법
1) 연구 지역
본 연구는 애틀랜타 대도시권(Atlanta Metropolitan Region)에 위치한 Ponce City Market(33° 46’ 22” N, 85° 38’ 3” W)을 중심으로 반경 8 km 이내의 지역을 연구 지역으로 선정하였다(그림 1). 애틀랜타 도시권은 미국 남동부 조지아주의 주도이며, 미국 인구 조사국에 따르면 인구 수가 약 630만 명에 달하는 미국 내 여섯 번째로 큰 대도시권에 해당한다(U.S. Census Bureau, Population Division 2024). 애틀랜타의 인구 수, 사회경제적 규모와 도시의 교통 문제 등을 종합적으로 고려하였을 때 이와 같은 규모의 도시가 가지고 있는 교차로 교통환경의 복잡성을 대변할 수 있는 지역으로 적절한 연구의 대상으로 선정하였다. 한편 Ponce City Market은 조지아주에서 가장 대표적인 도시재생 프로젝트로 꼽히는 복합문화시설로 Downtown Atlanta으로부터 북동쪽 2.5 km 지점에 위치한다. 고밀도 개발지역, 중밀도 개발지역, 저밀도 개발지역을 모두 포함할 수 있는 Ponce City Market 반경 8 km 이내를 연구의 공간적 범위로 지정하였다.
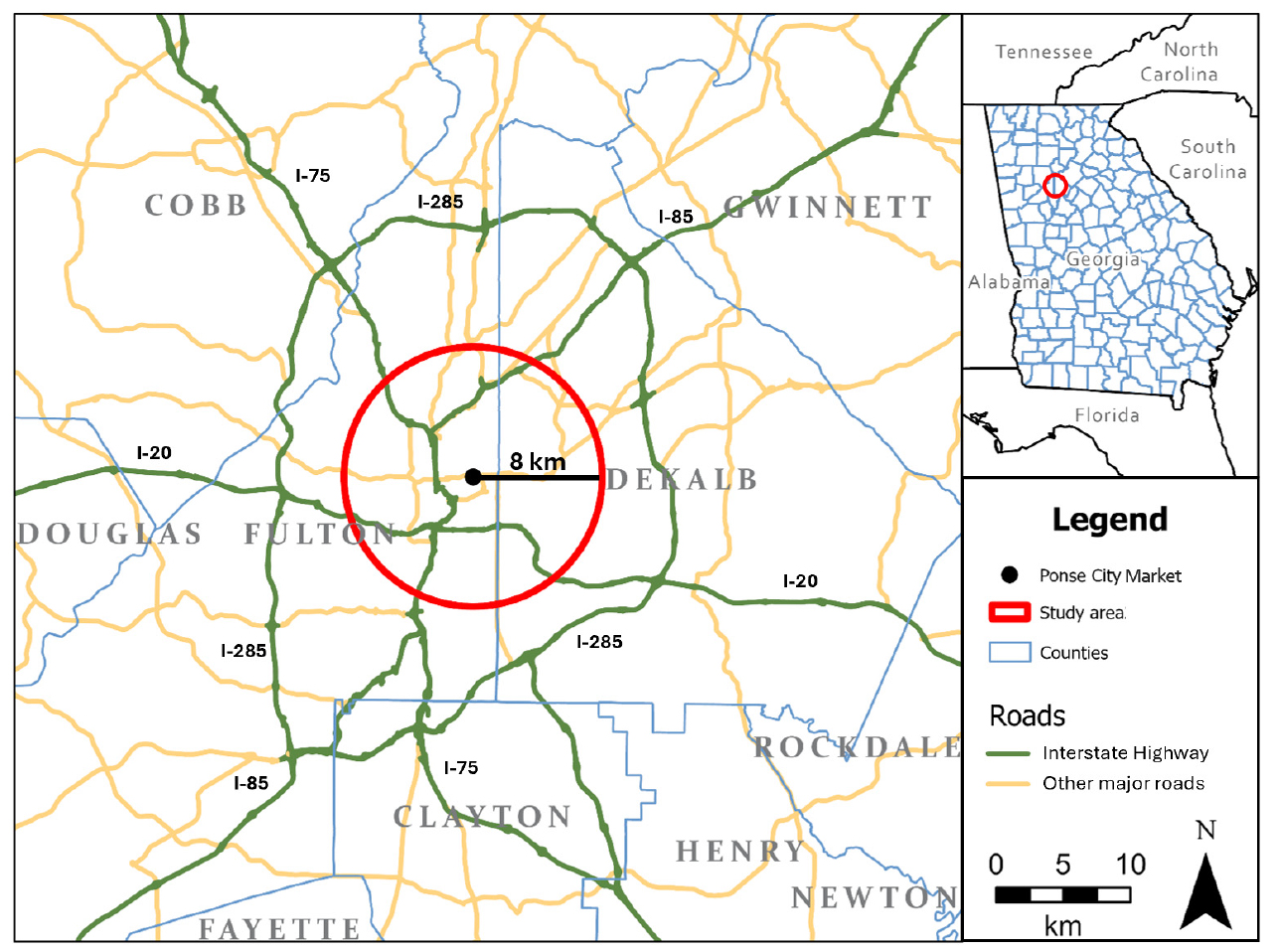
교차로는 ‘┼’자로, ‘⏉’자로나 그 밖에 둘 이상의 도로가 교차하는 부분이다. 도로 기능에 따른 분류체계를 참고하여 연구의 공간적 범위 내의 도로 중 교차로 교통환경을 설명하기에 어려움이 있는 주간 고속도로(Interstate), 주요 간선도로(Principal Arterial Other Freeways and Expressways)와 도로의 가장 하위 기능을 담당하는 지방도로(Local Roads)를 제외한 후, 기타 주요 간선도로(Principal Arterial), 보조 간선도로(Minor Arterial), 주요 집산도로(Major Collector), 보조 집산도로(Minor Collector)로 구분되는 총 4개 기능의 도로에 대한 교차로를 연구 지역으로 선정하였다. 교차로에 대한 전처리를 진행한 뒤, 2023년 한 해 동안 교통사고가 한 건 이상 발생한 382개 교차로를 연구 지역으로 선정하였다.
2) 활용 데이터의 개요
(1) 시각적 복잡성 변수
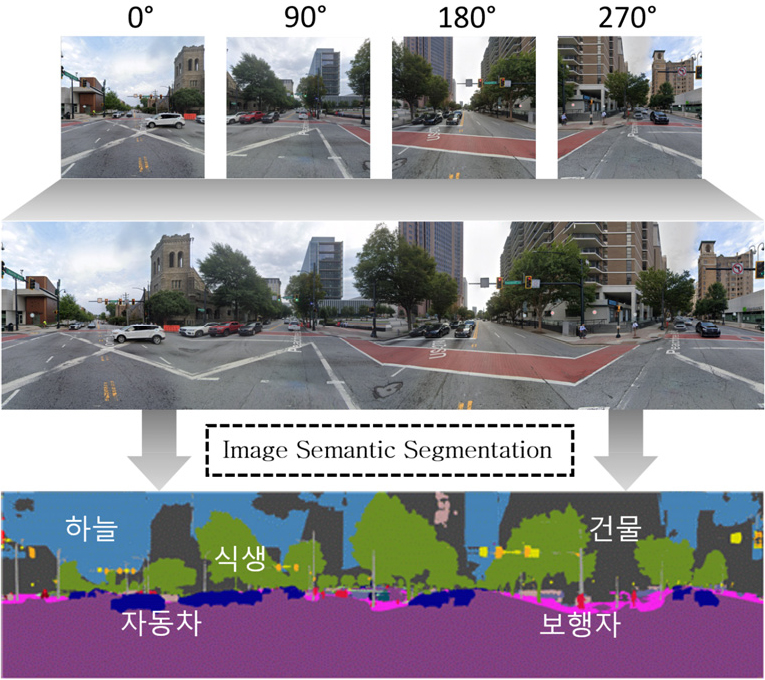
시각적 복잡성은 실제 도로 교통환경의 전반적인 시각적 인상을 의미한다. 특히 본 연구에서는 이미지 복잡성과 교통환경 장면의 구성요소 복잡성을 추출하였다. 연구 지역으로 선정된 교차로의 경위도 좌표에 해당하는 Google Maps 거리 영상을 크롤링했다. 각 교차로 포인트마다 가장 최근의 거리 영상을 불러온 후 0°, 90°, 180°, 270° 4방향을 수집하여 총 1,528장의 거리 영상을 획득했다. 각 교차로 별 네 장의 이미지를 하나의 파노라마로 만들어 이미지 복잡성에 해당하는 Grayscale Entropy, Spatial Entropy, GLCM을 계산했다. 이후, 이미지 시멘틱 세그멘테이션(Image Semantic Segmentation)을 진행하여 구성요소 복잡성에 해당하는 하늘 비율, 건물 비율, 식생 비율, SHDI를 추출했다(그림 2).
Grayscale Entropy 변수는 도로 환경의 색상이나 밝기 분포의 복잡성을 의미한다. Grayscale Entropy는 이미지에서 회색조 분포의 집합적 특징에 포함된 정보의 양을 나타내며 이는 파노라마의 1차원 Entropy로 표현된다(Guan et al., 2022). Spatial Entropy 변수는 도로 환경 이미지 전반에서 색상의 공간 분포를 의미한다. Spatial Entropy는 2차원 Entropy로 Grayscale Entropy의 공간적 특성을 설명한다(Guan et al., 2022). GLCM 변수는 도로 환경 이미지의 특정 부분에서 반복되는 시각적 패턴과 배열을 의미한다. Gray- Level Co-occurrence Matrix Entropy는 특정 Grayscale 값과 오프셋을 가진 픽셀 쌍이 이미지에서 얼마나 자주 발생하는지 계산하여 텍스처의 비균일성 또는 복잡성을 나타낸다(Aouat et al., 2021). 하늘 비율, 건물 비율, 식생 비율 변수는 이미지 시멘틱 세그멘테이션이 진행된 결과에서 각각의 픽셀 수를 총 픽셀 수로 나눈 값이다. Shannon Diversity Index(SHDI)는 생물다양성을 측정하는 지표 중 하나로, 주어진 샘플에서 종의 풍부성과 균등도를 동시에 고려하여 다양성을 측정한다. SHDI는 시각적 특징의 동질성과 풍부성을 모두 고려하기 때문에 경관 측정에서도 활용된다(Chen and Biljecki, 2023). 여기서 풍부성은 거리 영상에서 시각적 특징의 유형 수로 계산된다.
은 이미지 시멘틱 세그멘테이션에서 계산된 시각적 특징의 유형 수이며 는 전체 픽셀에 대한 번째 시각적 특징의 비율을 의미한다(식 1).
(2) 구조적 복잡성 변수
구조적 복잡성은 실제 교통환경의 구조적 특성과 환경 내 공간 요소의 구성을 의미하며, 교통환경 내 물리적 환경 특성을 식별하여 측정한다. 사람들의 행동과 활동에 중요한 역할을 미치는 도로 네트워크 환경의 구조적인 특징을 계산하기 위해 의 교차도로 수, 차선 수, 제한 속도, 교통량을 확인했다. 본 연구에서는 조지아주 교통부(Georgia Department of Transportation, GDOT)에서 제공하는 도로 데이터와 교통량 데이터를 바탕으로 도로 구조의 특징을 계산했다. 각 도로 데이터는 시작점과 끝점이 있는 폴리라인 형태로만 제공되었다. 교차도로 개수 변수는 각 교차로의 교차되는 도로의 개수를 의미한다. 차선 수 변수는 교차로의 각 도로 별 주행 차선 수의 합을 의미한다. 제한 속도 변수는 교차로의 각 도로 별 제한 속도 중 가장 빠른 제한 속도를 의미한다. 조지아주 교통부에서 제공하는 도로 데이터에서는 제한 속도에 대한 정보를 모두 확인하기 어려웠다. 따라서 제한속도가 불명확한 경우, Federal Highway Administration(FHWA)의 도로 기능에 따른 제한 속도를 고려하여 추정하였다. 교통량 변수는 교차로 포인트 위치에서 추정된 연평균 일일 교통량을 의미한다. 조지아 교통 모니터링 프로그램에서 수집한 교통량 데이터를 활용하였으며 추정이 필요한 도로에 대해 경우 Ordinary Kriging을 통해 교통량을 추정하였다.
(3) POI 복잡성 변수
POI 복잡성은 실제 도로 환경의 사회 문화적 의미와 특성을 의미하며 Google Maps의 Place API를 이용하여 POI를 수집하였다. 본 연구에서는 교차로 포인트의 경위도 좌표에 대해 교차로에서의 가시성을 고려하여(Guan et al., 2023) 반경 50m 내의 모든 유형의 POI 정보를 수집했다.
전체 POI 수 변수는 교차로 포인트 반경 50m 이내에 위치한 POI 수를 의미한다. 전체 POI 공간 분포 변수는 도로 환경에서 POI의 공간적 배열을 의미한다. Guan et al.(2023)에 의하면 전체 POI 공간 분포는 사람들의 장면 복잡성에 가장 큰 영향을 미친다. 본 연구에서는 POI의 공간 분포를 측정하기 위해 포인트의 군집 또는 분산과 같은 분포 패턴을 정량화 하는데 자주 사용되는 평균 최근접 이웃 비율(Average nearest neighbor ratio, ANN)을 활용했다. 는 각 POI와 그 최근접 이웃 간의 계산된 평균 거리이며(<식 2>), 는 무작위 패턴에서 POI의 예상 평균 거리를 의미한다(<식 3>). 는 POI 와 그 최근접 이웃 POI 간의 거리이며, 은 POI의 전체 개수, 는 버퍼의 면적에 해당한다. ANN은 을 로 나누어 계산하였다.
잘 알려진 POI 수는 수집된 POI 중 유명하고 영향력 있다고 판단된 POI의 개수를 의미한다. 문화시설과 금융시설, 유명한 체인 레스토랑·패스트푸드점에 해당하는 시설을 잘 알려진 POI 유형으로 선정하였다(Guan et al., 2022). 또한, 공공 서비스에 해당하는 의료시설, 교육시설을 잘 알려진 POI 유형으로 선정했다. 한편, 대중교통보다 개인 자동차 중심의 이동이 이루어지는 미국에서는 주유소가 중요한 역할을 한다. 따라서 교통시설의 항목으로 대중교통의 정류장과 함께 주유소를 잘 알려진 POI 유형으로 선정했다.
(4) 교통사고 데이터
본 연구에서 종속변수에 해당하는 교통사고 데이터는 조지아주 교통부에서 제공하는 2023년 데이터를 수집 및 가공하여 교차로 반경 50m 내에서 발생한 교통사고 건수로 계산되었다. 수집된 교통사고 데이터에는 교통사고가 발생한 지역의 County와 City, 경위도 좌표 등의 위치 데이터와 발생 연월일시와 같은 시간 데이터, 교통사고 정도를 평가할 수 있는 KABCO 부상 분류가 제공된다. 또한, 교통사고 당시의 날씨나 도로 표면의 상태, 밝기 정도가 제공된다. 본 연구에서는 시각적 특징의 복잡성을 고려하기 때문에 교통사고 당시의 밝기 정도를 고려하였다. 밝기 정도는 낮, 새벽, 황혼, 밤(불빛이 없음), 밤(불빛이 있음)으로 구분되는데 이 중 시각적 특징을 인지할 수 있는 낮, 새벽, 황혼에 발생한 교통사고만을 사용했다. 연구 지역 내의 400개 교차로에서 2023년 한해 동안 교통사고가 한 건도 발생하지 않은 교차로는 총 18곳이었다.
(5) 지표불투수율
지표불투수율(Fractional Impervious Surface)은 특정 지역의 표면적에서 가공된 재료나 포장, 콘크리트, 지붕 등의 구조물로 덮인 불투수성 물질이 차지하는 비율을 나타낸다. 따라서 도시화와 산업화 과정의 결과이자 토지 피복 분류의 기준이 되는 지표불투수율을 활용하여 도시개발 정도를 파악할 수 있다. 지표불투수율은 Multi-Resolution Land Characteristics(MRLC) Consortium에서 제공하는 래스터 데이터를 사용하였으며 해당 데이터의 해상도는 30m이다. 각 픽셀의 값은 지표불투수율을 의미하며 0%에서 100% 사이의 값을 갖는다. 완전히 투수될 때가 0%, 완전히 불투수될 때가 100%로, 불투수율이 높을수록 큰 값을 갖게 된다. 본 연구에 활용된 데이터의 정보 및 출처는 표 1과 같다.
표 1.
활용 데이터 정보 및 출처
3) 연구 방법론
시각적 복잡성 변수에 해당하는 하늘 비율, 건물 비율, 식생 비율을 구하고 SHDI를 계산하기 위해 이미지 시멘틱 세그멘테이션을 진행했다. 이미지 시멘틱 세그멘테이션은 이미지의 각 픽셀을 하늘, 건물, 식생 등 특정 클래스로 분류하는 방법론으로 이미지 데이터에 딥러닝 기술을 적용했다. 시멘틱 세그멘테이션을 위한 합성곱 신경망(CNN) 기반 아키텍처로는 Fully Convolutional Network(FCN)이 있으며. 이를 확장한 대표적인 구조로는 U-NET과 Deeplab 시리즈가 있다(Lee et al., 2024). 그중 본 연구에서는 도시 환경의 이미지 분류에 적합한 DeepLabV3+ 모델을 사용했다(Wang et al., 2023). 또한 본 연구에서는 훈련데이터 셋으로 cityscape을 사용했다. cityscape 데이터 셋은 독일의 50개 도시에서 수집된 5000개의 고해상도 이미지로 구성되어 있으며 도시 환경의 여러 개체들을 30개의 클래스로 나누어 라벨링 되어있다. 본 연구에서는 사전 학습을 통해 총 19개의 클래스를 분류할 수 있는 모델을 사용했다.
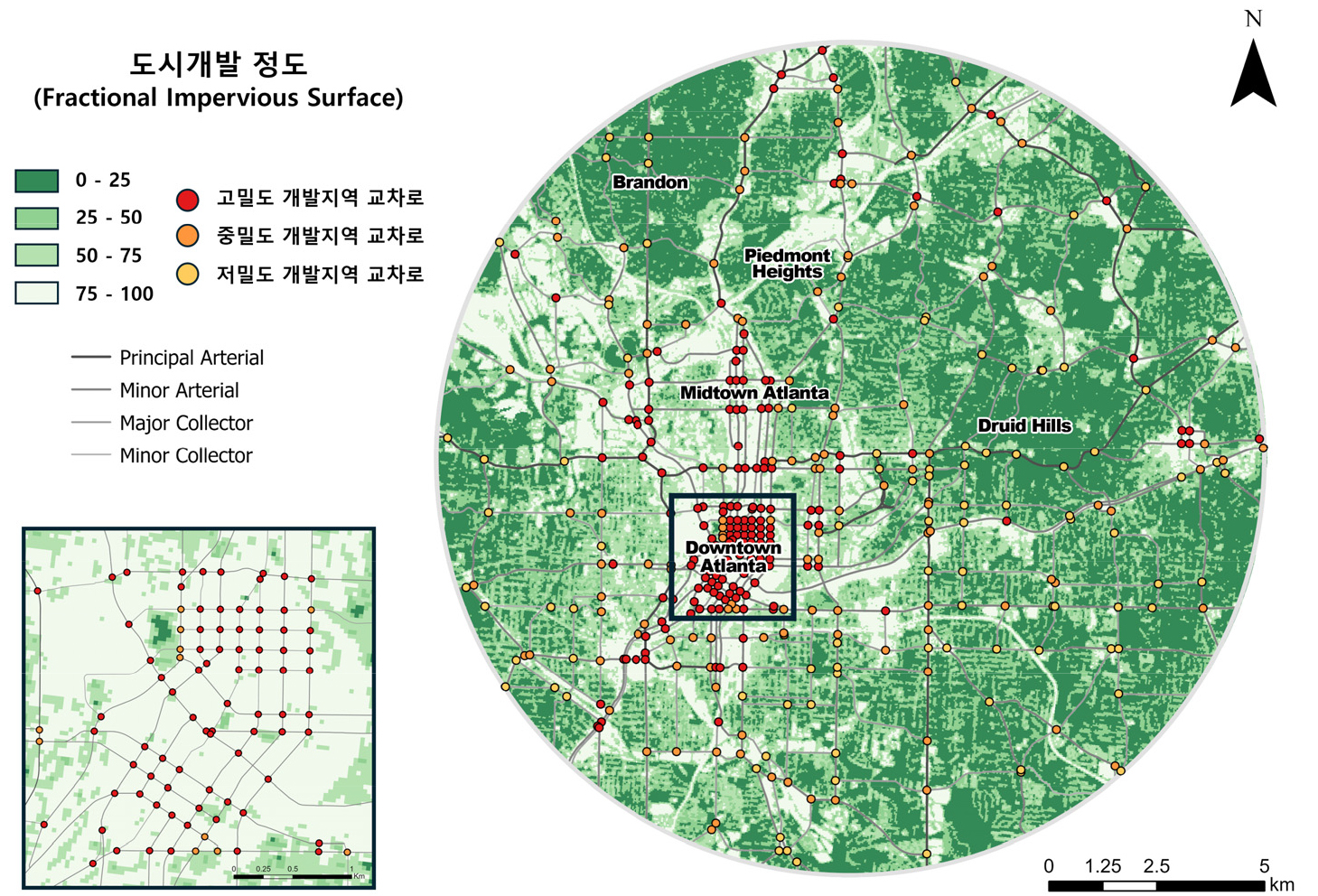
다음으로 도시개발 정도에 따른 복잡성 변수의 특징을 확인하기 위해 도시개발 정도와 복잡성 변수 및 교통사고와의 상관관계를 확인했다. 교차로 지점의 도시개발 정도를 추정하기 위해 교차로 포인트 반경 50m 이내의 픽셀을 추출한 뒤, 픽셀들의 지표불투수율 값을 평균 내어 계산하였다. 시각적 복잡성, 구조적 복잡성, POI 복잡성에 해당하는 대부분의 변수들이 정규분포를 따르지 않았기 때문에 스피어만 상관분석(Spearman’s Rank Correlation Coefficient)을 수행하여 도시개발 정도와의 상관관계를 확인하였다. 이후, 도시개발 정도를 기준으로 연구 지역을 고밀도 개발지역, 중밀도 개발지역, 저밀도 개발지역으로 분류하여 복잡성 변수와 교통사고와의 상관성을 확인했다. National Land Cover Database(NLCD)의 Land Cover Classification에 기반하여 불투수면이 75% 이상인 지역을 고밀도 개발지역으로, 75% 미만 50% 이상인 지역을 중밀도 개발지역으로, 50% 미만인 지역을 저밀도 개발지역으로 분류했다. 고밀도 개발지역은 상업과 산업 위주의 고도로 개발된 지역이며 아파트 같은 다가구 주택이 종종 존재한다. 중밀도 개발지역은 상업지역과 단독 주택, 식생이 혼재되어있는 지역이다. 저밀도 개발지역은 공원이나 골프장, 대규모의 단독 주택들이 주를 이루는 지역이다. 교차로가 위치한 지역의 도시개발 정도를 계산하기 위해 픽셀의 평균값을 대표값으로 하여 30m 공간해상도의 지표불투수율 데이터를 150m의 공간해상도로 조정하였다. 그 결과 고밀도 개발지역에 해당하는 교차로는 총 164곳, 중밀도 개발지역에 해당하는 교차로는 총 124곳, 저밀도 개발지역에 해당하는 교차로는 총 94곳이었다. 도시개발 정도에 따라 교차로를 분류한 뒤 복잡성 변수와 교통사고와의 상관성을 확인하기 위해 스피어만 상관분석을 수행했다.
4. 연구 결과
1) 교차로 교통환경 복잡성
Grayscale Entropy가 작은 경우 색상의 변화가 크지 않아 단조롭게 보이는 반면, 큰 경우 이미지의 디테일이 많고 색상이 다양했다. Spatial Entropy가 작은 경우 하늘과 도로가 이미지의 대부분을 차지하고 있어 공간적으로 일관된 모습을 보여 단순하게 느껴지는 반면, 높은 경우 건물이나 식생이 분포하여 공간적으로 구성요소를 예측하기 어려웠다. GLCM 값이 작으면 이미지의 텍스처가 부드럽고 단순한 정보를 제공하는 반면, GLCM 값이 크면 창문이나 벽돌과 같은 패턴들이 존재해 더 많은 시각적 정보를 제공하였다. 한편, 중심업무지구인 Downtown Atlanta와 Midtown Atlanta를 중심으로 하늘 비율이 낮게 나타났으며 건물 비율은 높게 나타났다. 또한, 건물 비율이 높으면 다른 이미지보다 보행자의 비율이 높았으며 하늘 비율과 정반대의 패턴으로써 비교적 뚜렷한 공간 패턴을 보였다.
연구 지역의 교차로는 과반수가 사거리 교차로에 해당하며 연구 지역 내의 교차로에서 차선 수는 10개에서 16개 사이가 대부분이었다. 주요 간선도로가 지나가는 곳은 모두 83곳이었으며 연구 지역에 해당하는 교차로의 연평균 일 교통량은 약 17,000대에서 20,000대 사이가 가장 많았다.
연구 지역 내의 교차로 포인트에서 반경 50m 이내에 있는 POI는 모두 3,911개였으며 POI의 유형은 모두 88개였다. 명확하게 구분되지 않은 유형의 POI가 가장 많았고 그다음은 transit station이었다. 한편, 주유소의 개수는 60개로 전체 유형 중에서 16번째로 많았다. 전체 POI 개수는 Downtown Atlanta에서 전반적으로 높으며 특히 Peachtree Center 등 비즈니스 센터가 밀집되어있는 일부 지역에서 매우 높게 나타났다. 또한, 비즈니스 센터가 밀집되어있는 상업지역에서는 POI의 공간 분포가 비교적 군집되어 있음을 확인하였다. 잘 알려진 POI는 Downtown Atlanta의 남쪽에서 비교적 높은 것을 확인할 수 있었다.
연구 지역 내 교차로에서 발생한 전체 교통사고 수는 5,116건이었다. 낮에 발생한 교통사고가 5,004건으로 가장 많았으며 새벽에 발생한 교통사고가 61건, 황혼에 발생한 교통사고가 51건이었다. 또한 맑은 날에 발생한 사고가 4,044건이었으며 구름이 낀 날이 717건, 비가 오는 날에 발생한 교통사고는 311건이었다.
복잡성 변수와 교통사고의 기초통계량은 표 2와 같다.
표 2.
복잡성 변수와 교통사고의 기초통계량
2) 도시개발 정도와 복잡성 변수 및 교통사고의 상관관계
연구 지역의 도시개발 정도를 시각화한 그림 3을 보면 Downtown Atlanta와 Mdtown Atlanta를 중심으로 도시개발 정도가 높게 나타남을 확인할 수 있다. 실제로 해당 지역은 애틀랜타의 대표적인 중심업무지구이다. 반면, 도시개발 정도가 낮은 지역으로는 Druid Hills, Piedmont Heights, Brandon 등이 있으며 해당 지역은 단독 주택, 공원 골프장의 비율이 높다.
도시개발 정도와 복잡성 변수, 교통사고 발생 건수와의 관계를 파악하기 위해 스피어만 상관분석을 진행하였으며 결과는 다음 표 3과 같다.
표 3.
도시개발 정도와의 상관관계
도시개발 정도와 양의 상관관계를 보이는 변수는 건물 비율, 교차도로 수, 차선 수, 전체 POI 수, 잘 알려진 POI 수, 교통사고 건수였다. 그중 건물 비율과 차선 수, 전체 POI 수는 도시개발 정도와 강한 양의 상관성을 보였다. 반면, 음의 상관관계를 보이는 변수는 Grayscale Entropy, Spatial Entropy, GLCM, 식생 비율, 전체 POI 공간 분포였다. 그중 식생 비율과 전체 POI 공간 분포는 도시개발 정도와 강한 음의 상관성을 보였다. 이러한 결과는 도시개발 정도가 높아질수록 교차로 이미지가 콘크리트와 회색톤으로 더욱 단조로워지며 식생이 줄어들고 POI 밀집도가 높아지는 경향을 고려할 때 당연한 결과로 보인다. 한편, 하늘 비율과 SHDI, 제한 속도, 교통량은 p-value 값이 유의수준보다 컸으며 관계성을 파악하기 어려웠다.
3) 도시개발 정도에 따른 복잡성 변수와 교통사고와의 상관관계
고밀도 개발지역, 중밀도 개발지역, 저밀도 개발지역으로 분류된 교차로의 교통환경 복잡성 변수와 교통사고 발생 건수와의 상관분석 결과는 표 4와 같으며 p-value 값이 유의수준보다 큰 변수는 제외되었다.
표 4.
복잡성 변수와 교통사고간의 Spearman 상관계수
연구 지역 전체를 대상으로 복잡성 변수와 교통사고와의 상관성을 확인했을 때, 이미지 자체의 복잡성을 계산하는 Grayscale Entropy와 Spatial Entropy, GLCM은 모두 교통사고와 약한 음의 상관관계를 보인다. 이는 이미지 자체의 복잡한 정도가 커질수록 교통사고 발생 건수는 감소하는 것을 의미한다. 하늘 비율은 교통사고와 약한 양의 상관관계를 보이며 식생 비율은 교통사고와 음의 상관관계를 보였다. 교차도로의 수, 차선 수, 교통량, 제한 속도는 교통사고와 비교적 강한 양의 상관관계를 보였다. POI 개수와 잘 알려진 POI 수 또한 교통사고와 약한 양의 상관성을 보였다.
고밀도 개발지역에 위치한 교차로의 교통환경 복잡성 변수와 교통사고 건수와의 상관관계를 확인할 경우, 이미지 자체의 복잡성과 관련된 변수들의 p-value 값이 유의수준보다 높았다. 하늘 비율은 교통사고와 약한 양의 상관성을 보였으며 식생 비율은 약한 음의 상관성을 보였지만, 두 변수 또한 p-value 값이 상대적으로 높아 시각적 복잡성과 교통사고와의 관계를 설명하기 어려웠다. 한편, 구조적 복잡성에 해당하는 교차도로 수, 차선 수, 제한 속도, 교통량은 비교적 강한 양의 상관성을 보였다. 전체 POI 공간 분포는 약한 양의 상관성을 보였다. 이는 POI가 분산되어 있을수록 교통사고 발생 건수가 증가함을 의미한다.
중밀도 개발지역에 위치한 교차로의 교통환경 복잡성 변수와 교통사고 건수와의 상관관계를 살펴보면 시각적 복잡성에 해당하는 Grayscale Entropy, Spatial Entropy는 교통사고와 약한 음의 상관성을 보였으며 GLCM과 식생 비율도 음의 상관성을 보였다. 반면 하늘 비율은 양의 관계성을 보였다. 구조적 복잡성에 해당하는 교차도로 수, 차선 수, 제한 속도, 교통량 모두 양의 상관성을 보였는데 그중 교통량은 강한 양의 상관성을 보였다. POI 복잡성에 해당하는 전체 POI 수와 잘 알려진 POI 수도 교통사고와 양의 상관성을 보였다.
저밀도 개발지역에 위치한 교차로의 교통환경 복잡성 변수와 교통사고 건수와의 상관관계에서 Spatial Entropy와 GLCM, 식생 비율은 교통사고와 음의 상관성을 보였으며 하늘 비율은 양의 상관성을 보였다. 구조적 복잡성에 해당하는 차선 수, 제한 속도, 교통량은 강한 양의 상관성을 보였다. POI 복잡성에 해당하는 전체 POI 수와 잘 알려진 POI 수는 교통사고와 양의 상관성을 보였다.
연구 지역 전체와 중밀도 개발지역은 변수 간 상관계수에서 유사한 양상을 보였다. 그러나 고밀도 개발지역의 경우, 시각적 복잡성과 POI 복잡성과 관련된 변수들이 전반적으로 낮은 상관성을 보였으며, 이들의 p-value 또한 유의수준보다 높아 통계적 유의성을 확보하기 어려웠다. 이에 비해, 구조적 복잡성과 관련된 변수들은 상대적으로 유의미한 상관성을 나타내어, 고밀도 지역에서는 구조적 복잡성이 교통사고 발생에 영향을 미칠 가능성이 높음을 시사한다. 저밀도 개발지역에서는 이미지 자체의 복잡성과 관련된 변수들의 p-value가 대체로 높았으나, 하늘 비율과 식생 비율은 상대적으로 눈여겨볼 만한 경향을 보였다. 반면, 교차도로 수는 유일하게 유의수준 이상의 p-value를 보여 통계적 유의성이 확보되지 않았다. 네 가지 개발밀도 유형 모두에서 공통적으로 건물 비율 및 SHDI는 p-value가 유의수준을 초과하였으며, Grayscale Entropy 또한 유사한 경향을 보였다. 한편, 전체 POI의 공간 분포는 고밀도 개발지역에서 교통사고 건수와 약한 상관성을 나타냈으나, 이 역시 p-value가 높아 명확한 인과관계를 도출하는 데 한계가 있었다.
한편, 연구 지역 전체, 중밀도 개발지역, 저밀도 개발지역에서 이미지의 Entropy와 관련된 변수들은 모두 교통사고와 음의 상관성을 보였으며 하늘 비율은 양의 상관성을, 식생은 음의 상관성을 보였다. 특히 중밀도 개발지역에서 하늘 비율이 비교적 강한 양의 상관성을 보였으며 식생은 비교적 강한 음의 상관성을 보였다. 구조적 복잡성은 도시 개발 정도와 상관없이 교통사고 발생 건수와 강한 양의 상관성을 보였으나 저밀도 개발지역에서 교차지점의 수는 유의미한 결과를 얻을 수 없었다. POI 복잡성과 관련해서, 연구 지역 전체, 중밀도 개발지역, 저밀도 개발지역은 전체 POI 수와 잘 알려진 POI 수가 교통사고와 양의 상관성을 보였다. 특히 중밀도 개발지역에서 잘 알려진 POI 수는 비교적 강한 양의 상관성을 보였다.
5. 요약 및 결론
교통사고의 대부분은 인적요인으로 인해 발생하는데, 이런 인적요인은 산만한 운전, 단조로운 운전 등 운전자의 부주의에서 비롯된다. 이런 배경에서 인적요인에 영향을 미치는 교통환경 요인에 대한 연구가 활발하게 이루어져 왔다. 하지만 운전자의 관점에서 인지되는 교차로 교통환경의 복잡성을 정량화하고 교통사고와의 관계를 파악하는 연구는 상대적으로 미미하며, 특히 대부분의 선행 연구가 교차로 교통환경의 복잡성을 분석함에 도시개발 정도를 고려하지 못한 한계를 갖는다. 따라서, 본 연구는 운전자 관점에서 교차로 교통환경을 인식하고 이해하는데 영향을 미치는 복잡성이라는 개념을 활용하여 그 특성을 파악하고 교통사고와의 상관성을 확인하고자 하였으며 도시개발 정도에 따른 차이를 확인하고자 했다. 이에 시각적 특징으로 7개의 변수, 구조적 특징으로 4개의 변수, POI 특징으로 3개의 변수를 선정하여 애틀랜타 교차로의 교통환경 복잡성을 복합적으로 고려하여 정량화했다. 이를 통해 복잡성 변수 및 교통사고 발생 건수와 도시개발 정도와의 상관성을 밝히고, 도시개발 정도에 따라 교차로를 구분하여 정량화된 교통환경 복잡성 변수들과 교통사고와의 상관성을 확인했다.
지표불투수율을 활용한 도시개발 정도와 복잡성 변수간의 상관관계를 확인한 결과, 강한 양의 상관성을 갖는 변수는 건물 비율, 차선 수, 전체 POI 수였으며, 강한 음의 상관성을 갖는 변수는 식생 비율과 전체 POI 공간 분포였다. 또한, 도시개발 정도와 교통사고 발생 건수는 양의 상관성을 보였다. 교통사고와의 상관성 측면에서, 식생 비율을 제외한 시각적 복잡성은 전반적으로 음의 상관관계를, 구조적 복잡성과 POI 복잡성은 양의 상관관계를 보였다. 고밀도 지역에서는 구조적 복잡성이 주요하게 작용했으며, 중밀도 지역에서는 시각적, 구조적, POI 복잡성 모두 상대적으로 큰 영향을 미쳤다. 저밀도 지역에서는 시각적 복잡성과 일부 구조적 복잡성이 유의미한 경향을 나타냈다.
Grayscale Entropy, Spatial Entropy, GLCM은 교통환경 이미지 자체의 복잡성을 설명하는 변수이다. 선행연구를 통해 교통환경의 색상이 단조로워지고 이미지가 단순해질 때 운전자의 교통환경에 대한 주의력이 감소할 확률이 높아지며, 시각적 스캐닝 범위가 좁아짐을 확인할 수 있었다(Lemercier et al., 2014). 따라서 교통환경 이미지의 복잡성이 증가하면 운전자는 교통환경에 더 집중하게 되고 이는 교통사고의 유발을 감소시키는 것으로 해석해 볼 수 있다. 한편, Abdel-Aty et al.(2024)에 따르면 하늘의 비율이 높을수록 과속하는 경우가 증가하여 교통사고 발생 가능성이 높아지는 것을 확인했다. 또한, 도로 주변의 식생이 많을수록 운전자는 차선을 더 좁게 인지하게 되어 주행 속도가 감소하며, 이로 인해 교통사고 발생 가능성이 낮아지는 경향을 보였다(Calvi, 2015). 이러한 선행연구는 하늘 비율이 교통사고와 양의 상관성을 보이고 식생 비율은 음의 상관성을 보이는 본 연구결과와 부합한다. 교차도로 수, 차선 수, 제한 속도, 교통량과 같은 구조적 특징은 다수의 연구에서 확인했듯 교통사고 발생과 양의 상관성을 갖고 있으며 다른 특징보다 교통사고와 더 강한 상관성을 보이는 것을 확인할 수 있었다. Guan et al.(2023)에 의하면, 사람들이 인지하는 교통환경 복잡성에 가장 큰 영향을 미치는 것은 POI의 공간 분포였으며 POI 수 또한 많은 영향을 미쳤다. 하지만 POI를 통해 교통환경을 인지하는 것과 교통사고와의 관계성을 직접적으로 설명하기는 어려웠다.
시각적 복잡성과 구조적 복잡성, POI 복잡성이 지역별로 교통사고에 미치는 영향이 상이하다는 점에 착안하여 다음과 같은 방향의 전략이 고려될 수 있다. 먼저, 고밀도 개발지역의 경우 구조적 복잡성이 교통사고와 높은 상관관계를 보였으므로, 차선 수가 많거나 교통량이 많은 교차로를 우선적으로 관리 대상에 포함시킬 필요가 있다. 해당 교차로에서는 신속한 사고 대응을 위해 CCTV 설치 또는 경찰 순찰 강화와 같은 대응 방안을 고려할 수 있다. 다만, 이러한 조치는 사고 발생 이후의 대응에 초점을 둔 단기적 대응 방안으로 본질적인 문제를 해결하기에는 어렵다는 한계가 있다. 중밀도 개발지역에서는 시각적, 구조적, POI 복잡성 모두 상대적으로 두드러졌다. 따라서 교통량과 차선 수가 많고, 잘 알려진 POI가 인접하며 시각적으로 단조로운 교차로를 우선적으로 식별하고 시각 정보의 명료성을 높이는 방안을 구축할 필요가 있다. 예컨대 교통 표지판 재배치, 노면 유도선 정비 등을 할 수 있다. 또한, 식생 비율이 사고 발생과 음의 상관성을 보인 점을 고려할 때, 교차로 주변에 식생을 보완적으로 배치하는 것도 사고 예방 효과를 기대할 수 있을 것이다. 저밀도 개발지역의 경우, 제한속도가 교통사고와 가장 높은 상관관계를 보인 변수로 나타났기 때문에, 무엇보다도 속도 저감 전략을 도입하는 것이 효과적일 수 있다. 구체적으로는 제한속도를 하향 조정하거나, 단속 카메라 설치, 경찰 순찰 강화 등의 조치를 통해 규제 실효성을 확보할 필요가 있다. 다만, 저밀도 지역은 교통량 자체가 적은 경우가 많아 자원 투입 대비 효과성에 대한 검토가 함께 이루어져야 할 것이다.
본 연구는 운전자가 교차로 교통환경을 인식하고 이해하는데 영향을 미치는 변수를 시각적 복잡성, 구조적 복잡성, POI 복잡성을 모두 고려하여 정량화했다는 점에서 의의가 있다. 또한, 복잡성의 개념으로 교통사고와의 상관성을 확인했으며 고밀도 개발지역, 중밀도 개발지역, 저밀도 개발지역으로 세분화하여 각 특성에 맞는 전략을 제안할 수 있었다. 그러나 본 연구에서 사용된 변수들 중에는 하늘 비율과 건물 비율, 건물 비율과 전체 POI 수, 차선 수와 제한 속도 등 서로 상관성을 보이는 변수가 존재한다. 따라서 시각적, 구조적, POI 복잡성 간의 잠재적인 연관성을 파악하고 이를 구체화하기 위해 PCA 등을 진행해야 할 것이다. 더 나아가, 단순 상관분석 결과만으로는 모든 변수 간 관계를 파악하고 일반화하기에 한계가 있다. 다변량 분석을 추가로 수행함으로써, 변수 간 상호작용이나 종속·독립 변수 간 관계의 방향성 변화, 통계적 유의성 수준의 변화 등을 보다 정교하게 파악할 수 있을 것이다. 아울러, 본 연구에서는 복잡성을 시각적, 구조적, POI 복잡성으로 구분하였으나, 각 변수와 이론적 개념(scene complexity, affordance, spatial cognition) 간의 직접적인 대응 관계를 명확히 설정하기에는 한계가 있다. 변수 분류는 실증적 분석을 위한 실용적 접근에 기반하였으며, 향후 연구에서는 인지심리학 및 인지 지리학 이론을 반영한 보다 정교한 개념 정의와 이론적 틀의 도입이 요구된다.
